For years we’ve been sold the idea of robots. Sci-fi films, cartoons, books and sitcoms portray a future where we’ll be using robotic contraptions in our everyday lives and even walking amongst humanoid robots. But this is far from our reality.

Modbot co-founder Adam Ellison
However, two engineers from Australia – Adam Ellison and Daniel Pizzata – want to change that. Their goal is simple: to make robotics so accessible that real robots can be built by anyone.
Their Modbot invention is a set of modular building blocks that simply consists of a servo, a joint and a link.
These components can be assembled, much like Lego, in any combination to build an infinite number of robots for an equally infinite number of purposes. Examples include a pick and place machine, a 3-axis 3D printer, a robotic camera dolly, a racing car simulator, a prosthetic leg or even an entire humanoid robot.
“Our intention is to become the ultimate robot development platform and we’ll achieve that by making it simple and cost effective to build up a robot,” explains Ellison. “If you have a specific problem that you want to solve you will be able to jump onto modbot.com and configure a robot by browsing through our list of kits.
Kind of like IKEA – you can browse, order the kit, have it delivered and when it arrives, easily assemble it.”
The Modbot story began in October 2013 when Ellison and Pizzata met up at a sushi bar in Melbourne ten years after initially meeting at Curtin University of Technology in Perth, Australia, where they were both undertaking engineering degrees.
With a decade to catch up on, they began discussing the different but parallel paths their careers had taken.
Ellison, with studies in mechanical engineering and commerce, had been working predominantly in the automotive field and then did consulting work that included building interesting one-off robots. Whilst Pizzata, with his double degree in electronics & communications engineering and physics, had been designing electronics projects for the Department of Defence and then worked as a contractor.
Common grievances
Having compared notes of their various endeavours, they discovered that, firstly, they were both frustrated by the tools they had available to them in their various job roles and, secondly, they shared a passion for modern robotics.
Modbot co-founder Daniel Pizzata
“We were sitting there working out what the ideal solution would even look like because it is all very well whinging about the toolset available, it’s another thing altogether to know exactly what would solve your problems.
So, we came up with this system and started bouncing the idea around. That’s how Modbot was born,” describes Ellison.
In the subsequent brain storming sessions, Ellison took inspiration from a transmission design project he had recently been developing for an electric scooter as he realised it would be suitable for a robotics application.
“I realised that the form factor and characteristics of that transmission design would also solve this automation tool problem we’d been discussing. That is basically what Modbot was conceived from,” he explains.
The pair then started creating many iterations of their concept with Pizzata working on the circuit board design and Ellison on the mechanical design. “Usually a robot would require custom engineering for each joint. For instance, you have to develop a shoulder, arm and wrist joint. So what we first started looking at was ways of using the same joint over and over again in the robot.
“The first step was to design a joint that could use the same servo for these two different types of motion. So we came up with a symmetrical form factor for the servo motor itself. In other words, it basically makes this symmetric, fully functional joint with the same servo module,” he says.
Having created the functional building blocks, Ellison then worked on making them as aesthetically pleasing as possible. As he comments, “It doesn’t necessarily cost anything more to make something look good.”
Launch time
Just a few short months later in January 2014, the pair were accepted to take part in the TechCrunch Battlefield, a competition organised by technology media property TechCrunch that enables new start-ups to launch their wares on arguably technology’s biggest stage – the Consumer Electronics Show (CES) in Las Vegas.
This was the first time that Modbot was shown to an international audience and it certainly caught the attention of a few people, not least one of the TechCrunch Battlefield’s panellists, Brady Forrest, who heads up the Highway1 Accelerator programme in San Francisco.
“He came up to us after the show and asked if we’d want to be involved in his programme,” remembers Ellison.
“After some discussion we accepted the offer and came back to the US at the end of March 2014 for an intensive acceleration programme to create a fully functioning prototype robot using and mobile application to drive it.”
So, leaving family and friends behind, Pizzata and Ellison embarked on a new journey to bring their robot dream to life. But with an extremely tight deadline, they lived and breathed this project, pouring everything they had into it and often working 18 hour days.
“We got to a point about half way through the programme when we realised that we couldn’t build every single part of the robot ourselves, we would have to use some off – the-shelf components. From that point to demo day, we designed and built a whole new robot in five weeks.
“That five week sprint was by far the most challenging part of the journey so far,” says Ellison.
Using Fusion 360
For the design work, Ellison had a few CAD systems in mind but trying to launch a product on a shoestring and with these systems being prohibitively expensive, he selected to use Fusion 360.
Developed by a team at Autodesk, Fusion 360 began its life as an experimental technology preview on Autodesk Labs.
The intention was to offer a cloud-based platform where users could easily collaborate using a direct modelling tool or equally work on their own. Having been in beta for seven months, Fusion 360 officially launched as a paid service in June 2013.
“The main factors that drew me to it still hold true and that is the month by month payment and flexible scaling. In other words, you don’t have to pay for what you aren’t using,” says Ellison.
Modbot consists of three essential components – a servo, a joint and a link
Although a young programme, Ellison found it more than sufficient for what he was trying to achieve. It was fast to use, probably as it’s relatively new and there aren’t lots of commands cluttering up the workspace. He could also very easily work in real-time over the cloud with his animator in Sydney, Australia, and suppliers in Shenzhen, China.
Benefits of networking
During this intensive development period, a networking event was held at the Highway 01 offices in April 2014. But with a fast approaching deadline, Ellison spent most of the event sat at his desk working away.
However, this didn’t stop people coming over for a chat. One such interested person was Srinath Jonnalagadda, senior business development manager of Fusion 360, although Ellison was unaware of that at the time.
“What immediately caught my attention from talking to Ellison and Pizzata at this networking event were two things. Firstly, the idea of a modular DIY kit for robots that is so simple, yet yields a result that is close to the current industrial grade robots in the market. And secondly, rich engineering and visual detail in the digital prototype Adam showed on his laptop, which really made evident the full potential and vision of their idea,” says Jonnalagadda.
Jonnalagadda started asking Ellison questions about the 3D tool he was using and what he thought of it. “I let loose and let him know exactly what I thought; that the software is pretty good but still buggy and there are some issues with it. It was funny when he then revealed where he was from,” smiles Ellison.
A six degree of freedom robot arm constructed using Modbot’s modular components
But this is exactly what Jonnalagadda wanted to hear because at Fusion 360 feedback is encouraged from the user community and often fed straight into forthcoming releases. Apparently, the September 2014 release contained over 50 customer driven improvements alone.
“Fusion 360 has a vibrant online community that regularly challenges us to rethink how we develop and deliver the product – this is the driving force for Fusion 360 and suggestions continue to play a very important role in our development process,” says Jonnalagadda.
Jonnalagadda suggested setting up a meeting with Ellison giving him time to collate all his feedback. Armed with two pages, Ellison went to the meeting, which was meant to be one hour but went on for over four. “Adam’s commentary on ‘equation driven curves’ alone must have taken at least an hour,” laughs Jonnalagadda.
“Jokes aside, Adam embodies the kind of engineer with an entrepreneurial mindset that Fusion 360 is designed for. The fact that innovators like him choose Fusion 360 for product development is a strong validation of our vision for the tool.”

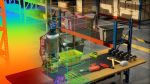
Modbot can be used to create an endless array of products. An example is a racing car simulator with a seat attached to a Modbot servo to simulate the realistic motion of racing
Ellison was more than happy to provide this feedback as he and Pizzata both feel that Fusion 360’s vision aligns with where Modbot want to be. “With Modbot we are democratising robotics with the aim of making it accessible to everyone and similarly, Fusion 360 is rethinking the traditional notion of CAD/CAM to put it in the hands of more users.
“We now have a very good collaborative relationship with Autodesk – we are using their software and testing it out and they like robots so we are talking a lot,” says Ellison.
Meeting the deadline
Following the intensive development process, Ellison and Pizzata did manage to produce a prototype of a moveable robot arm by the deadline.
This was then shown to a roomful of potential investors as well as their early backers, revealing what their investment enabled them to achieve.
But now the next phase of hard work begins – showing the prototype to companies that would find use for it. The pair have decided that they will initially focus on industrial applications for the Modbot with a launch to the consumer market planned for the end of the year.
Another example could even be a walking hexapod
“The theory is that industrial customers already know how to use robots and so have safety systems all sorted out. They also have a strong demand for low cost robots,” comments Ellison.
As well as setting up a trial of a Modbot robot at two production facilities, the pair are keeping themselves busy by visiting companies and demonstrating Modbot. “We have a small red suitcase and it’s quite amazing to see this large robot fold out of it. It certainly takes people by surprise as you usually don’t see a robot on a boardroom table as part of a pitch,” he smiles.
The pair, however, realise that to launch the complete Modbot robot development platform, enabling users to configure and then purchase their robot parts through an online Virtual Robot Builder, will take collaboration from others in the robot building community.
“We are working with various teams including those developing sensors, software, hardware to create a kit to ultimately give those people who have a vision of the future the tools to see it through. We believe that by making technology radically accessible it will increase the bandwidth for innovation,” concludes Ellison.
Bringing robots to life with Modbot building blocks
Default